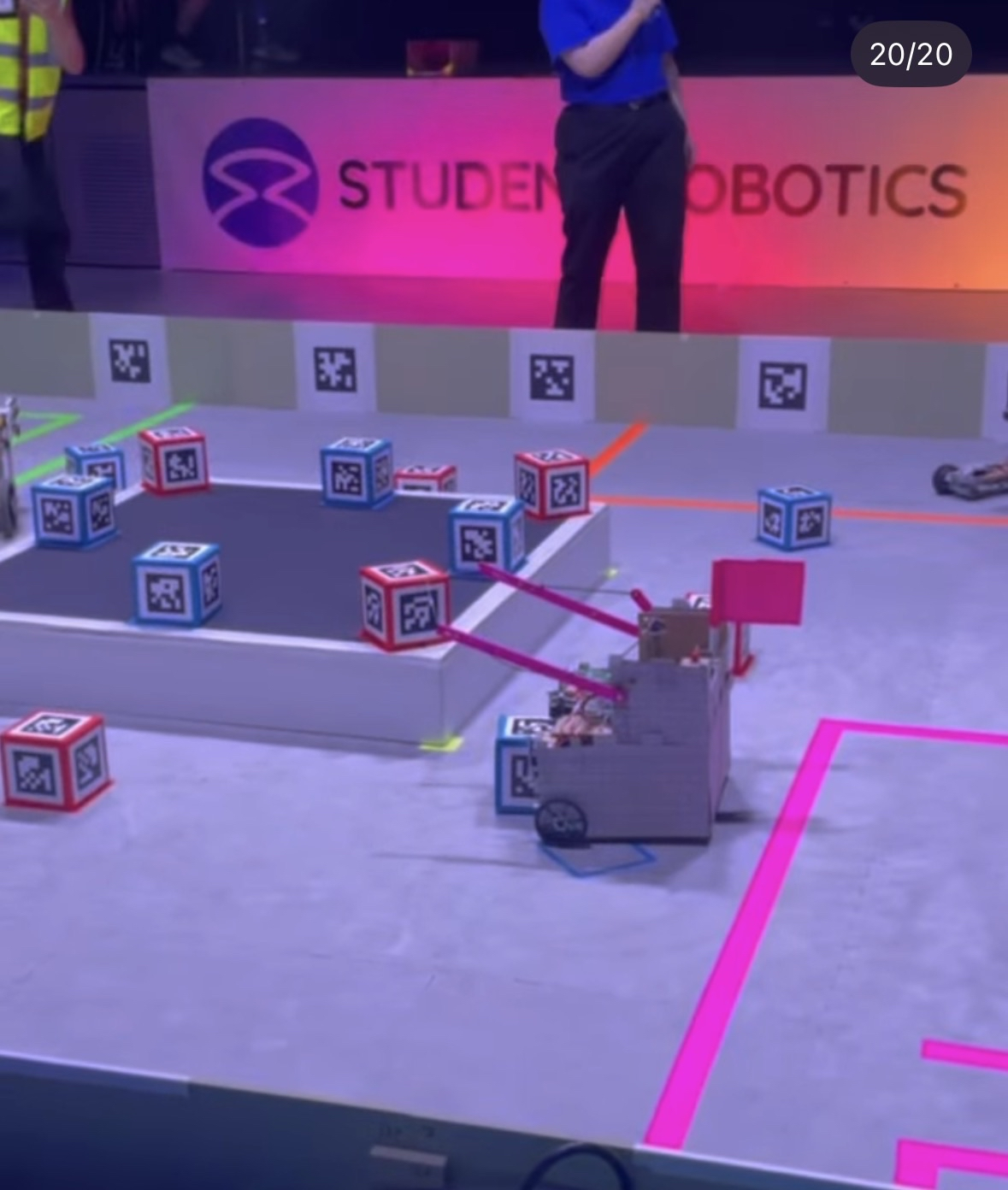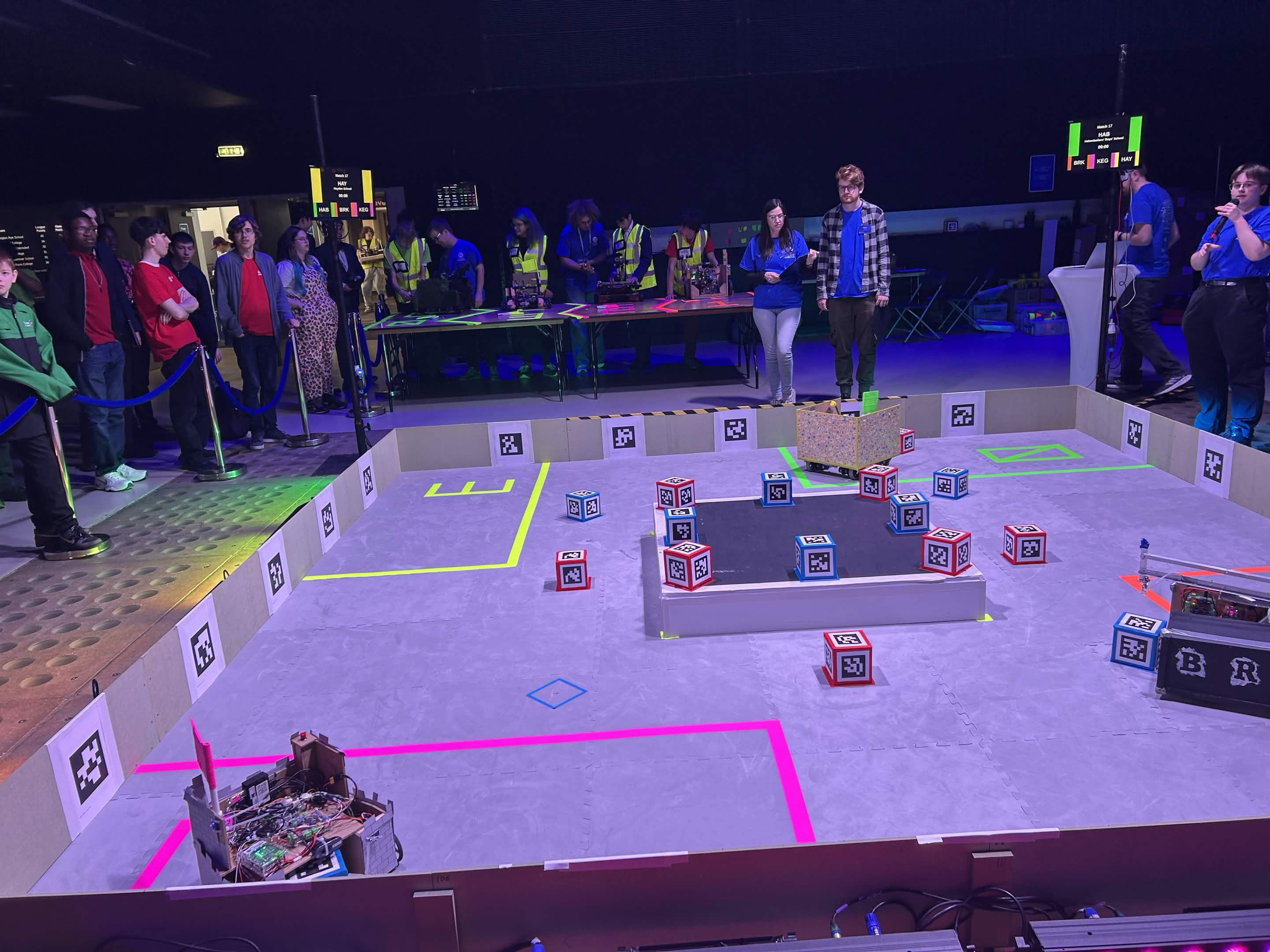
Student Robotics is a UK-wide competition challenging sixth form teams to design, build, and program a fully autonomous robot from scratch — no remote control, no human input during a match. The 2026 competition was held at the University of Southampton and themed around chemistry. Robots were tasked with collecting coloured boxes — red (acid) and blue (base) — with scoring based on how far from neutral pH 7 a team could push their tally. Collecting both colours cancelled each other out, adding a layer of strategic decision-making to every match.
Our robot competed against over 20 teams across two full days. After finishing 5th in the league stage, we fought back through the lower knockout bracket to reach the Grand Final, placing 4th overall and winning the Robot & Team Image Award.
The competition opened with the Kickstart Event, where the challenge brief was released and teams assembled for the first time. Understanding the pH-themed scoring system deeply enough to form a coherent strategy was the first engineering task — before any tools or software were touched.

Before committing to any design, the team researched the core engineering challenges: vision systems for box detection, movement strategies for arena navigation, and collection mechanisms. We also studied the scoring system carefully — consistent collection of one colour was strategically safer than chasing two and risking cancellation.
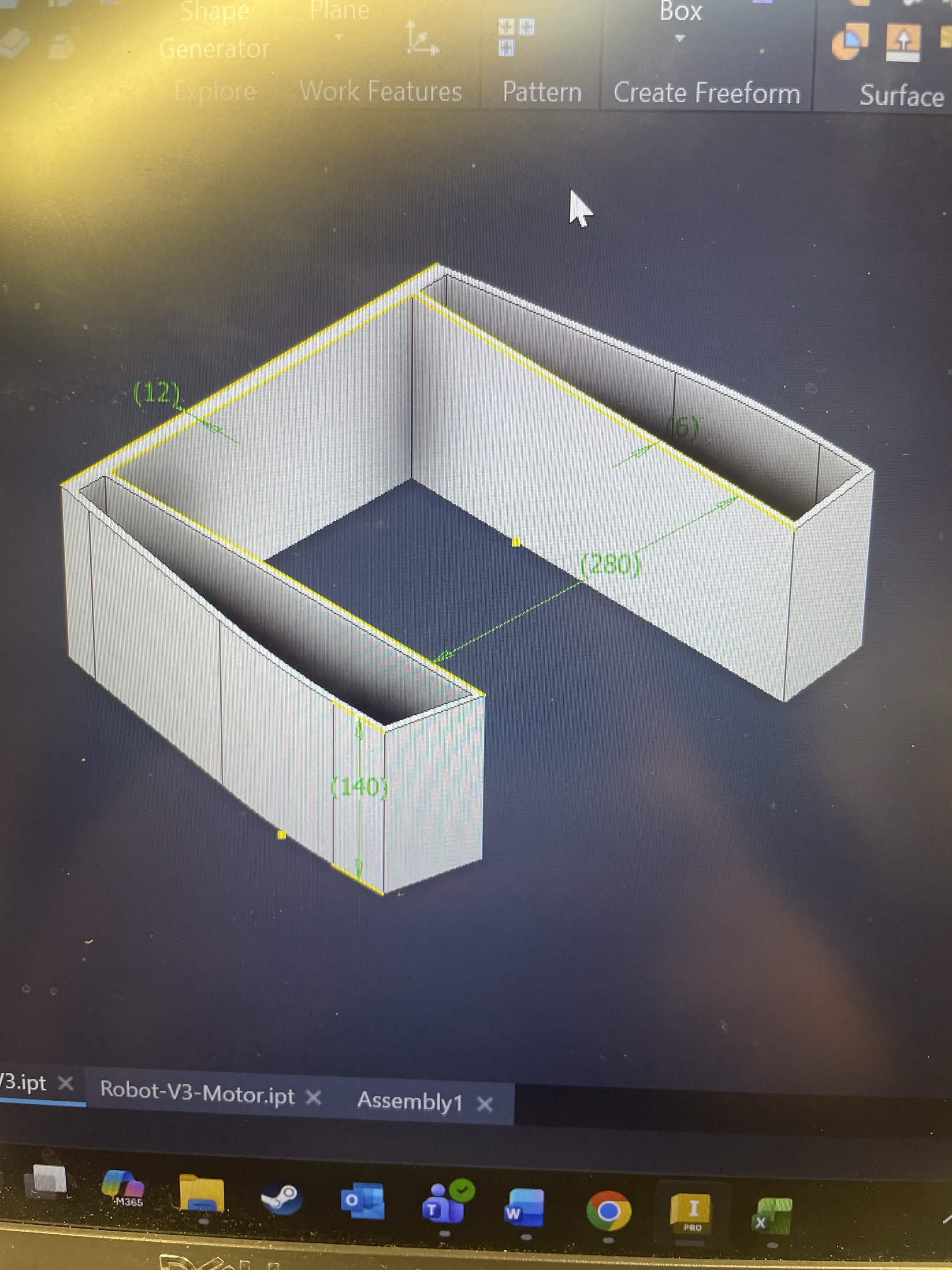
The key insight that shaped the entire build: rather than designing a complex arm or suction mechanism, we would make the chassis geometry itself do the collection work. A U-shaped chassis wide enough to drive over floor-level boxes, combined with drop-down front gates to trap them on reversal. Simpler, lighter, and fewer things to break.
With the strategy set, I translated it into a physical design using Autodesk Inventor. The chassis was modelled as a two-level MDF structure — a lower bay housing the drive system, and an upper platform keeping all electronics and circuitry easily accessible between matches. The U-shape was dimensioned to straddle competition boxes while remaining within the robot size limits in the rulebook.
Alongside the mechanical design, the team developed the robot's visual identity — including a custom competition badge — which would later contribute to winning the Image Award.
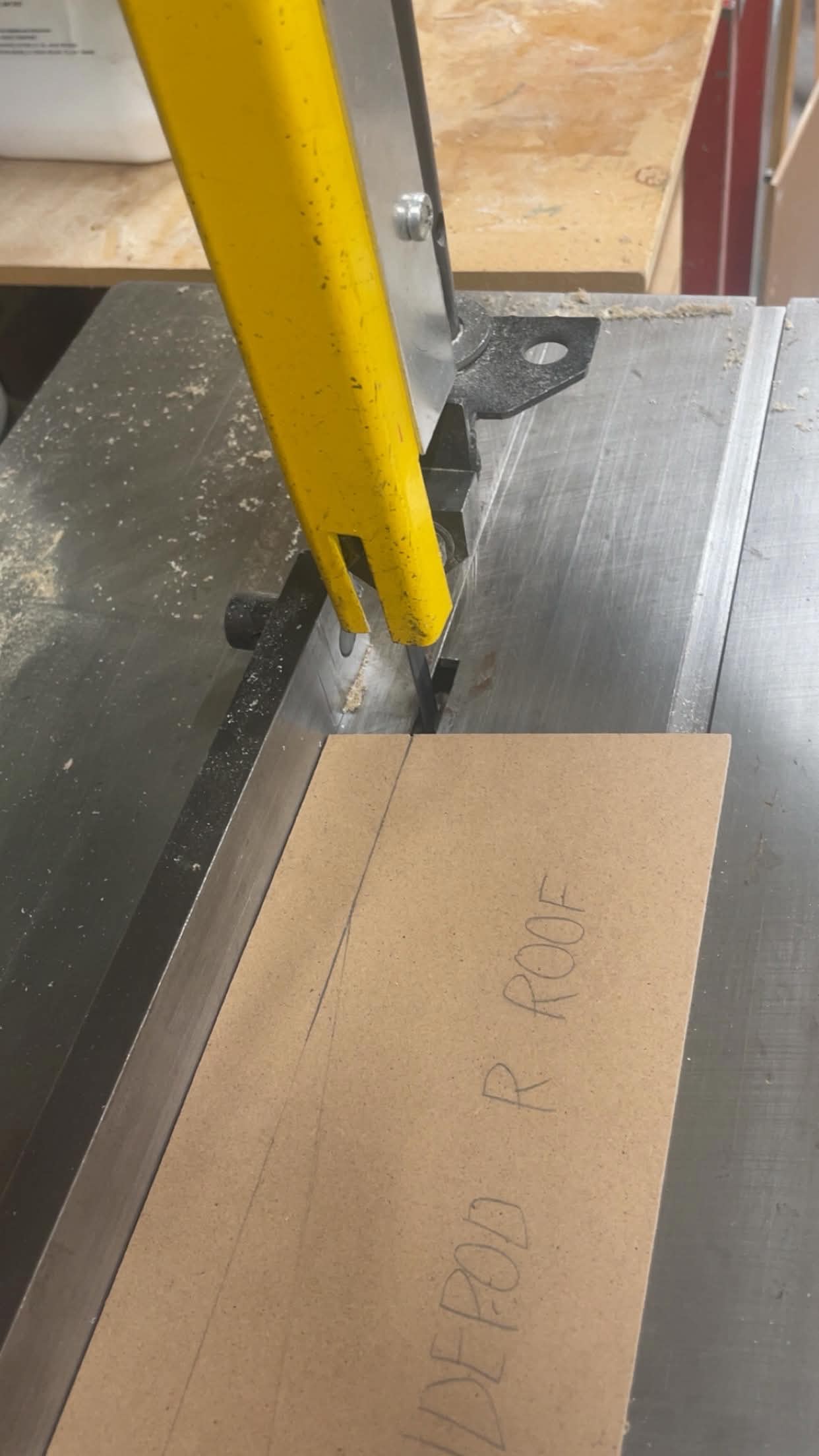
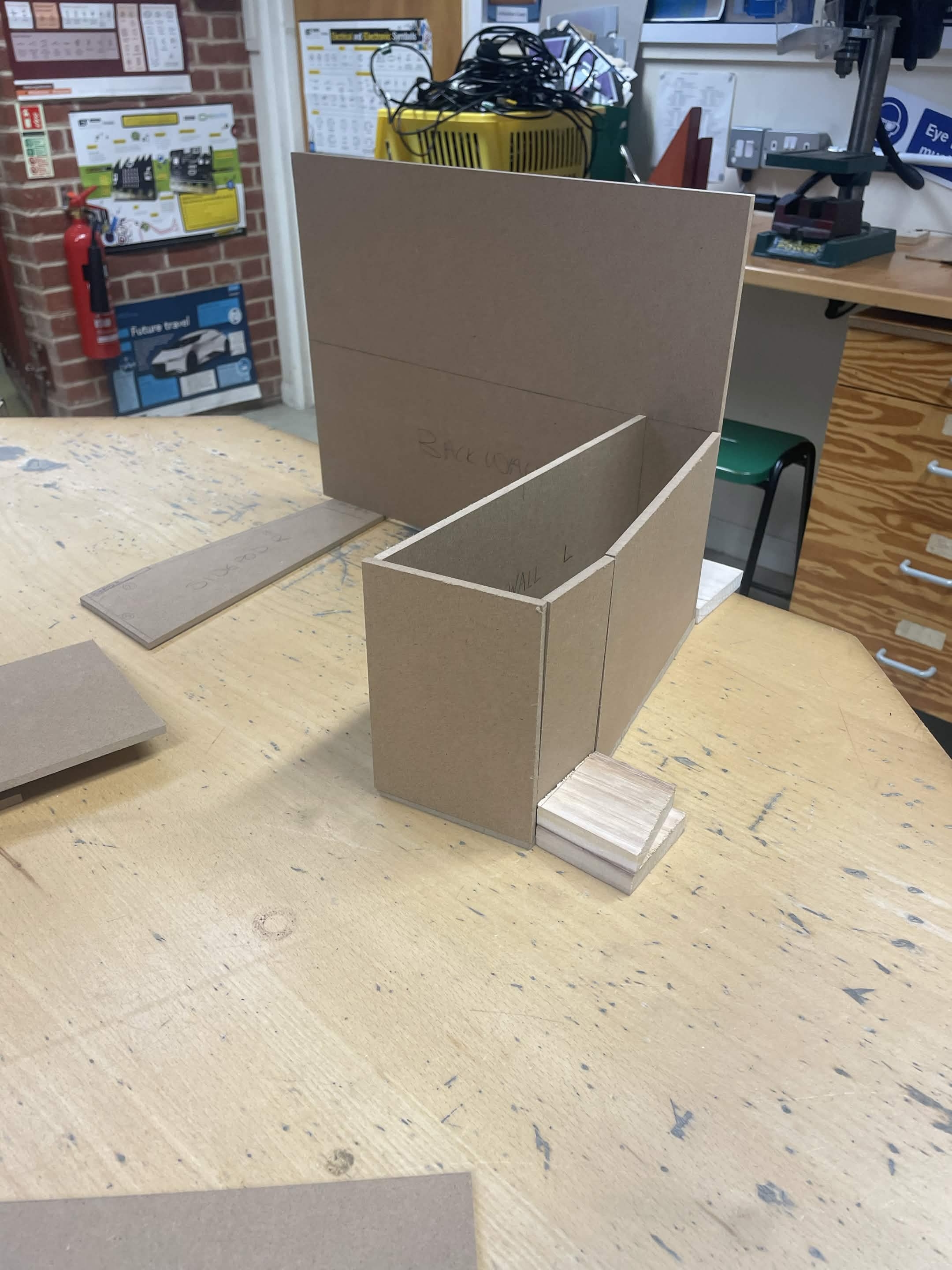
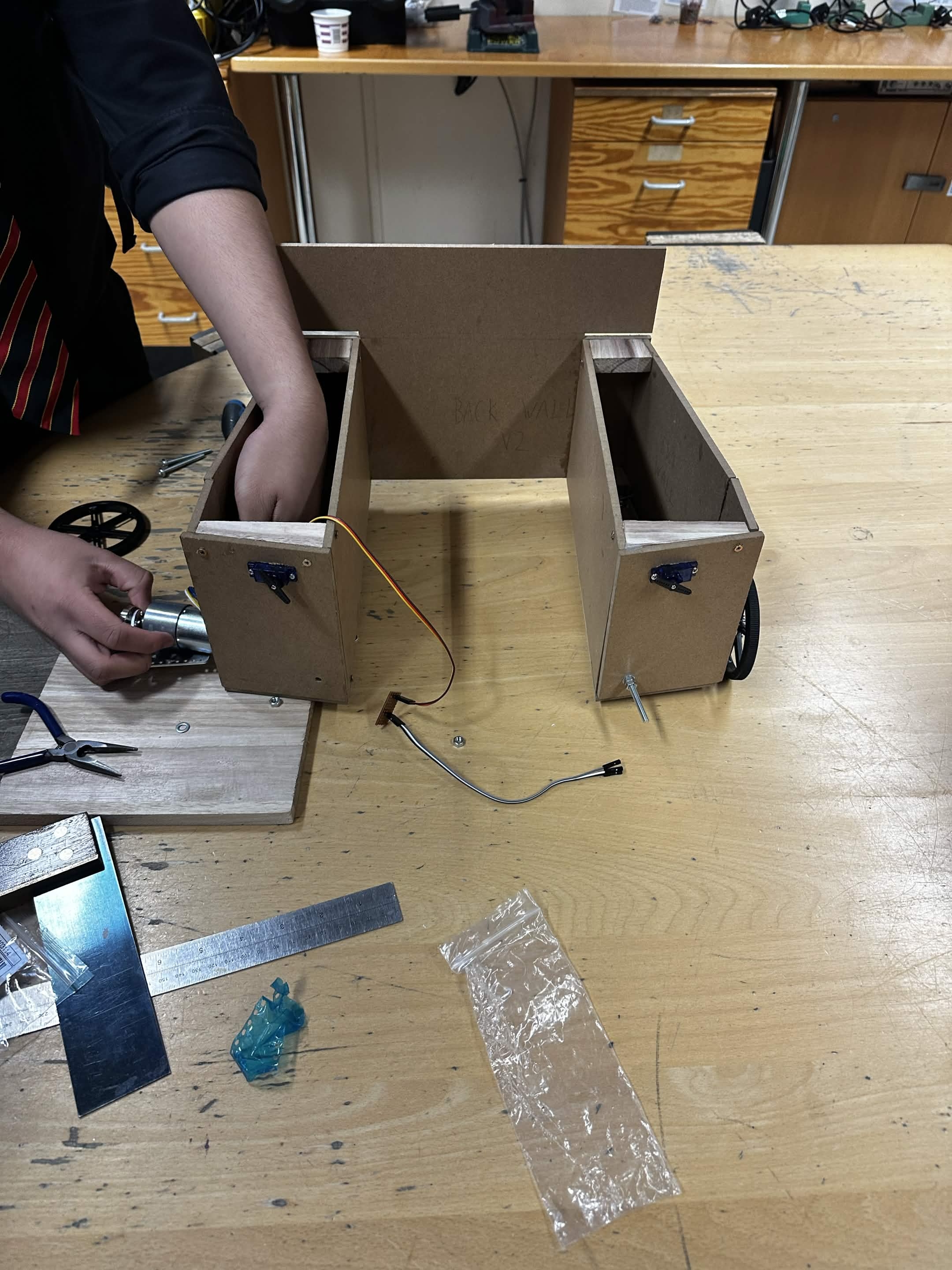
All chassis panels were cut from MDF sheet using the bandsaw, labelled before cutting to keep assembly clean and unambiguous. The U-shaped frame was built in stages — side walls first, then the internal divider separating the drive bay from the electronics platform. Drive motors and servo mounts were fitted directly to the lower chassis walls, keeping the centre of gravity as low as possible.

With the chassis structurally complete, the programming team's electronics were integrated — Raspberry Pi brain, motor controllers, camera, and all associated wiring, routed through the chassis without fouling the drive system. My role was hardware integration: ensuring secure mounting, clean routing, and cross-referencing the Student Robotics rulebook throughout to confirm full compliance before every test.
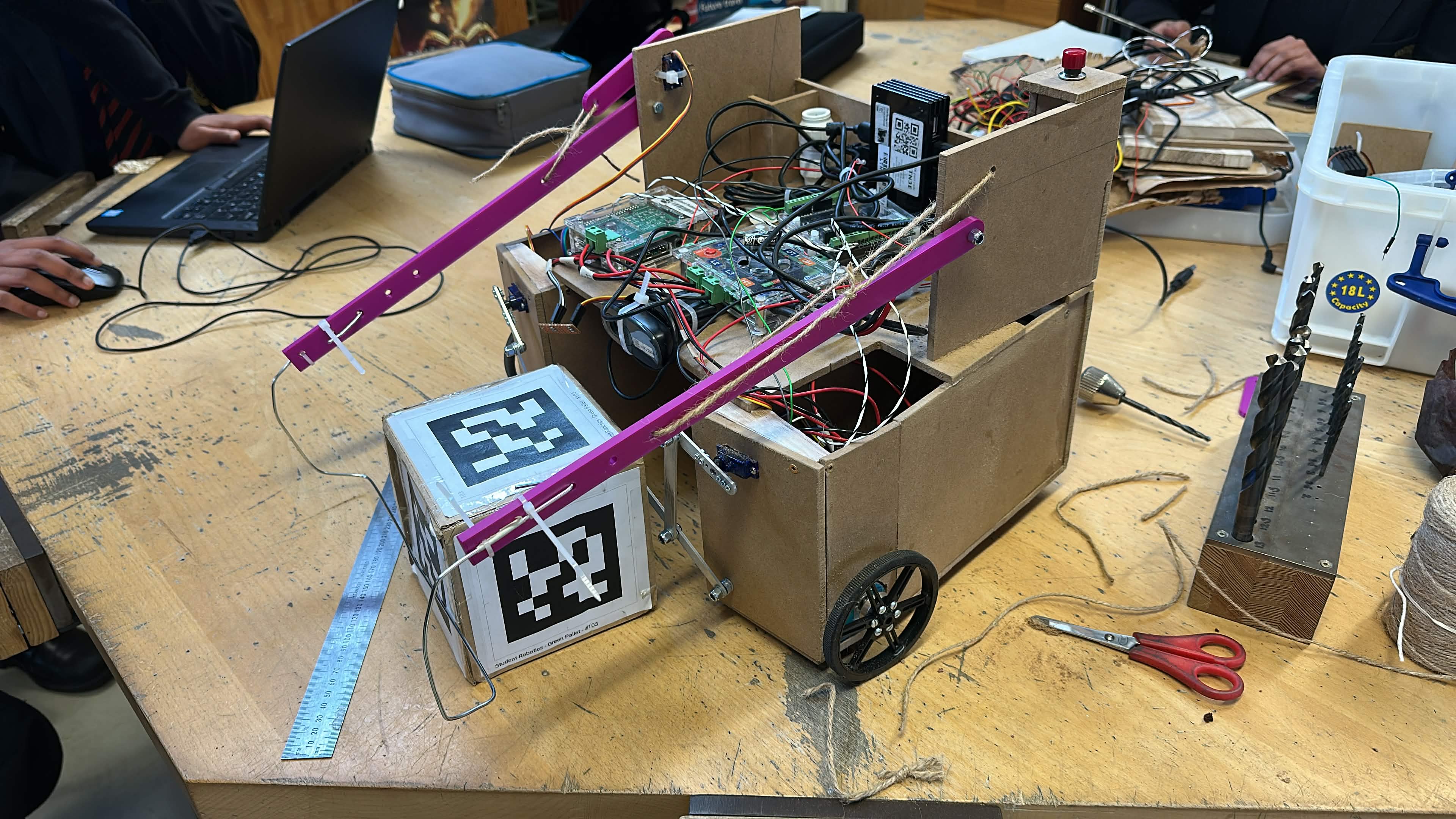
The final pre-competition phase involved running the robot through a series of simulation challenges and physical test arenas to validate software behaviour and identify mechanical issues under match conditions. The gate mechanism was tested repeatedly to confirm it deployed reliably on reversal — it was the most mechanically critical part of the collection strategy.
Competition day arrived after a tense final evening — the robot had stopped working entirely the night before, requiring an emergency fix before the doors opened at Southampton. It was the sharpest test of the whole project: diagnose, fix, and be competition-ready under real pressure.
The competition ran in two stages. The first day and a half was a league stage of round-robin matches. Our robot collected one box per match consistently — not the ceiling we had aimed for, but reliable. Many robots scored nothing at all, and our consistency pushed us to 5th in the league, winning first place in 6 of our 8 matches.
The top 8 teams seeded into the knockout bracket. In the upper semi-final we faced the eventual winners Gymnasium Markt Indersdorf, Hills Road, and The Ladies' College — losing and dropping to the lower bracket. In the lower semi-final, we beat Haberdashers' Boys and Headington Rye to fight our way back to the Grand Final. We finished 4th overall out of 20+ teams, and collected the Robot & Team Image Award.