Suspension Geometry
Formula 1 cars use double-wishbone suspension at every corner. The geometry of the wishbone arms — their lengths, angles, and mounting positions — determines how the tyre behaves mid-corner: how much it tilts, how well it grips, and how the car's body rolls. Getting this geometry right is one of the most fundamental jobs in race car engineering.
This page walks through the theory from first principles, then lets you explore it interactively in the simulator below. If you already know the theory, skip straight to the tool.
Skip to simulator →Camber is the angle of the wheel relative to vertical, viewed from the front of the car. Zero camber means the wheel is perfectly upright. Negative camber means the top of the wheel tilts inward toward the car. Positive camber tilts it outward.
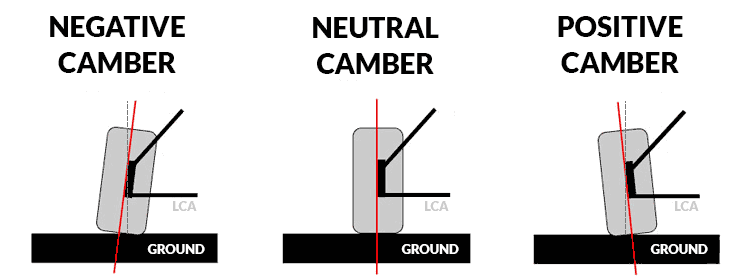
Negative, zero, and positive camber — viewed from the front of the car
When a car corners hard, the tyre deforms and its contact patch — the part touching the road — wants to peel away on one edge. A small amount of negative camber counteracts this, keeping more of the tyre flat on the road and maximising grip. F1 cars typically run −3° to −4° of static negative camber at the front because the cornering forces are so extreme.
A double-wishbone suspension uses two A-shaped arms — upper and lower — connecting the wheel hub to the chassis. Each arm pivots at two points on the chassis side and meets the hub at a single ball joint on the wheel side. As the wheel moves up and down, both arms swing through arcs.
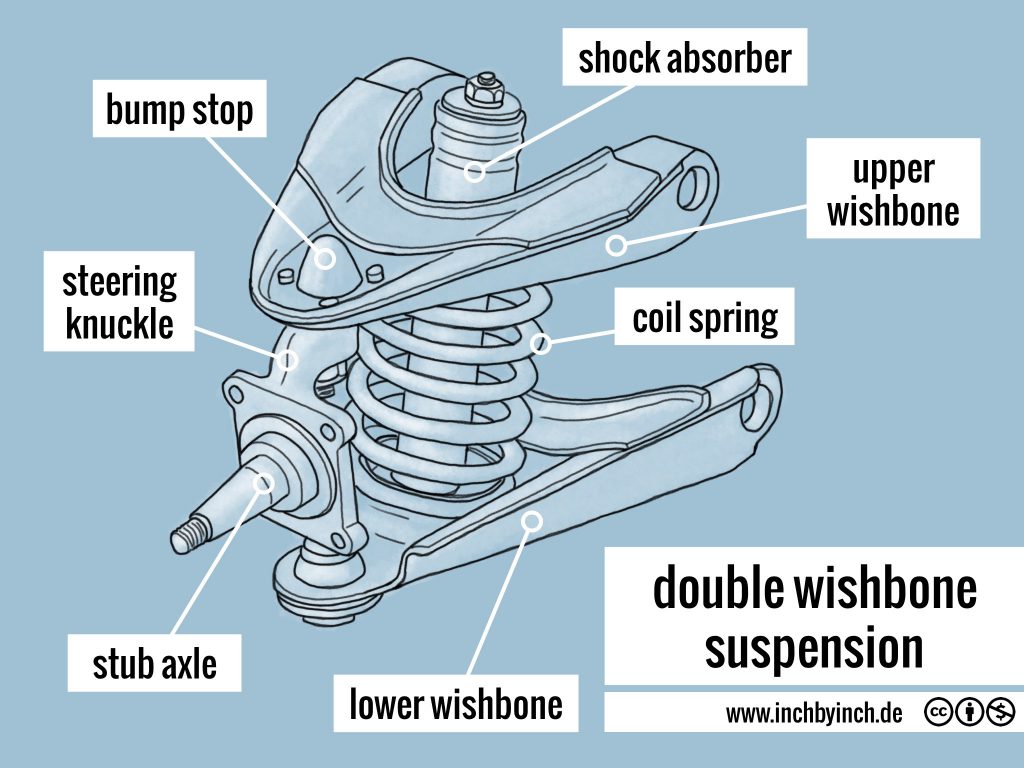
The double-wishbone layout — upper arm, lower arm, upright, and chassis mounting points
The critical detail: the upper arm is shorter than the lower arm. This is deliberate. If both arms were the same length, the wheel would move in a perfect parallelogram — staying perfectly vertical at all times. That sounds ideal, but in a corner the car rolls and the wheel simply tilts with the body, losing contact patch.
Because the upper arm is shorter, as the wheel compresses upward in a corner, the top of the wheel is pulled inward slightly faster than the bottom. The wheel gains negative camber automatically — fighting the roll and keeping the tyre flat on the road. This is built into the geometry passively, with no electronics or active components.
The two wishbone arms are at slightly different angles. If you extend a straight line through each arm outward away from the car, those two lines eventually meet at a point in space. That meeting point is called the instant centre.
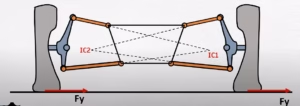
The instant centre — found by extending both wishbone lines until they intersect
At any given moment, the wheel assembly isn't just moving straight up and down — it's rotating about the instant centre. Think of it like the wheel is on an invisible arm, pivoting around that point. The instant centre is the tip of that invisible arm.
If the wishbones were parallel, the lines would never meet — the instant centre would be at infinity and the wheel would move in a perfectly straight vertical line. No camber change at all, and no ability to tune handling behaviour.
Once you have the instant centre, finding the roll centre is one more step. Draw a line from the instant centre down to the contact patch — the point where the tyre touches the ground. Where that line crosses the centreline of the car is the roll centre.
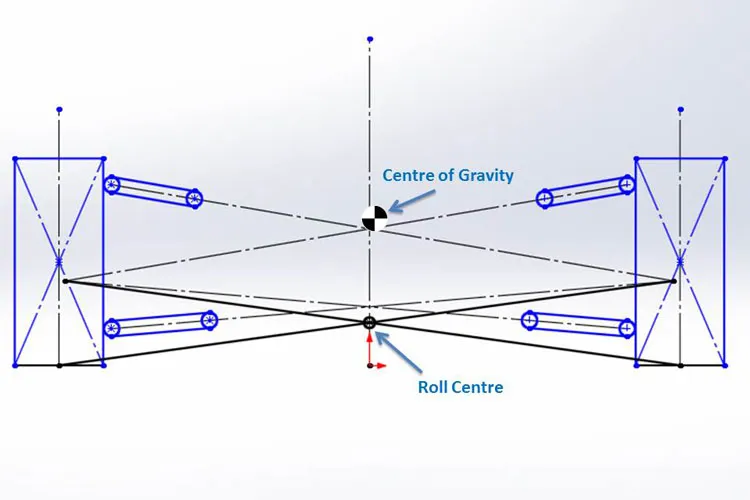
The roll centre — where the line from the instant centre to the contact patch crosses the car's centreline
The roll centre is the point around which the entire car body rotates when it rolls in a corner. Think of it as the pivot point of the car's lean. When the car corners hard, the lateral load acts through the centre of gravity — which sits above the roll centre. This creates a moment (a turning force) about the roll centre, rotating the body and compressing the outer suspension.
Every calculation in the simulator below comes from coordinate geometry — nothing beyond A-level maths. Each suspension component is represented as a point in 2D space (x, y), viewed from the front of the car. The origin sits at the contact patch on the car's centreline.
Lower inner pivot: (x₁, y₁) — chassis side, lower arm
Lower outer pivot: (x₂, y₂) — wheel side, lower arm
Upper inner pivot: (x₃, y₃) — chassis side, upper arm
Upper outer pivot: (x₄, y₄) — wheel side, upper arm
Step 2 — Find line equations for each wishbone:
gradient m = (y₂ - y₁) / (x₂ - x₁)
intercept c = y₁ - m·x₁
→ y = mx + c (repeat for upper arm)
Step 3 — Solve simultaneously for the Instant Centre:
m₁x + c₁ = m₂x + c₂
x_IC = (c₂ - c₁) / (m₁ - m₂)
y_IC = m₁·x_IC + c₁
Step 4 — Find the Roll Centre:
Draw line from IC to contact patch (x_cp, 0)
Substitute x = 0 → y_RC = roll centre height
The camber angle is found from the geometry of the upright — the angle between the line connecting the lower outer pivot to the upper outer pivot, and the vertical. As bump travel changes, all four pivot positions shift, which means the instant centre moves, the roll centre moves, and the camber angle changes. The simulator recalculates all of this in real time.
Adjust the geometry using the sliders below. Every number updates in real time — try loading the F1 preset and dragging the wheel travel slider to see how camber and roll centre behave through a corner. Click the ? buttons for an explanation of any parameter.